Download EZPhysics
The EZPhysics application has a set of examples pre-compiled for windows that you can use to start playing with simulations and control, immediately getting a felling for it's immense possibilities. It also contains all source code for these examples so that you can jump right in the action and start creating your project!
https://sourceforge.net/projects/ezphysics/files/
EZPhysics can be used in many different ways, the Editor provides a GUI to parametrize and test a simulation, EZPhysics Demo gives the ability to open and run a simulation using the EZPhysics Library and the EZPhysics SVN repository holds the entirety of the source code used in EZPhysics.
The following four topics describe EZPhysics for a specific need, please refer to the appropriate one:
EZphysics Editor
This editor provides the user an easy and intuitive way of loading the desired robot model and building the scene it interacts with. The editor takes Ogre3D mesh files as the body's graphical representation and provides all the physic parameters available in the ODE simulator. With the remote control feature this is also the perfect tool for control engineers and hobbyists.

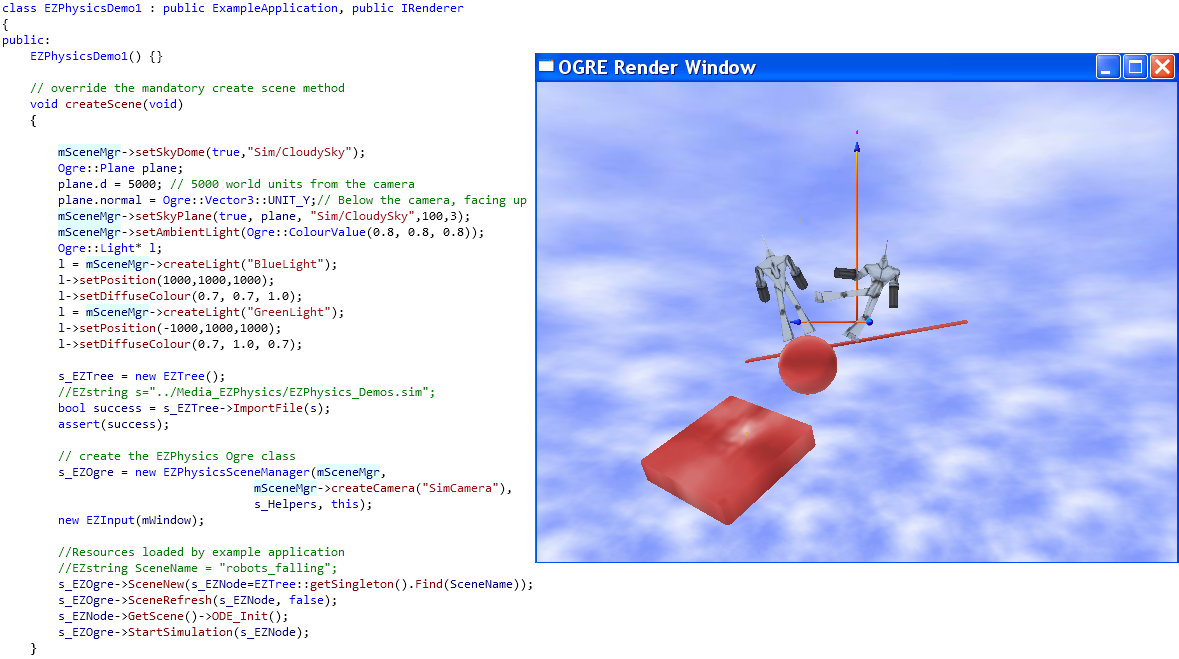
EZPhysics No Editor Demo
This demo shows a way of using EZphysics Library without the editor. Essential for a final product application and very useful to develop a control loop without network. It contains only the essential code to run EZPhyiscs + Ogre3D (less than 150 lines of code) that can be used as a base for experimentation with the framework without having to download all the source.
EZPhysics Network Controller Demo
In this example it is easy to understand how to interact with EZPhysics library through TCP/IP. You can setup a network connection with several settings such as real-time or number of simulation steps per network package (check the wiki for more).
If you want to write code to control your simulated robot this is the example to look at! Simply look for the frase "Your controller here" and you will be able to start to code in no time.
EZPhysics Matlab interaction Demo
With EZPhysics it is possible to interact with Matlab! This is done with a s-function that does the sending and receiving, this s-function can be integrated in your control loop simulating the real world input. Check the wiki for more information and a video on how to compile and use your own s-function, very important since it needs to be different for every robot.
You need to have Simulink to use this demo. Tested for Matlab R2010b.

EZPhysics Source
EZPhysics is an open-source project. As such, it is hosted on sourceforge and freely available for any use. To access the latest version, report bugs, request features, contribute to the project or even make your own version follow the link to EZPhysics project page and follow the instructions provided for your goal.
To download all the source code you will need to access wither a SVN (subversion) or CVS(Concurrent Versions System) code repository. This can be done using the appropriate programs, please just follow the instructions on the "Code" tab of the project page.